[PaRev] G-Safeguard: A Topology-Guided Security Lens for LLM-based Multi-Agent Systems
A review of G-Safeguard, a graph-based framework for detecting and remediating attacks in LLM-based multi-agent systems.
On March 13, 2026, I reviewed G-Safeguard: A Topology-Guided Security Lens and Treatment on LLM-based Multi-agent Systems.
[ACL 2025] G-Safeguard: A Topology-Guided Security Lens and Treatment on LLM-based Multi-agent Systems
Shilong Wang, Guibin Zhang, Miao Yu, Guancheng Wan, Fanci Meng, Chongye Guo, Kun Wang, Yang Wang
USTC, Tongji University, Wuhan University, Shanghai University
The paper studies a security problem that becomes harder once LLM agents are connected as a system. A single autonomous agent can already be attacked through its prompt, memory, or external tools. In a multi-agent system (MAS), the same vulnerability can spread through ordinary inter-agent communication.
The key question is:
If agents exchange information through a graph, should defense also understand that graph?
G-Safeguard answers yes. It models MAS communication as a multi-agent utterance graph, detects abnormal agents with a graph neural network, and then performs topological intervention by pruning risky information flows.
All figures in this post are extracted from the original paper source files or cropped from my presentation material. I did not generate any synthetic figures or use full-slide screenshots. The MAS concept, attack-surface, edge-pruning, and limitation diagrams are cropped from the PowerPoint presentation; the other figures are converted from the original arXiv source figure files.
Additional resources: ACL Anthology, arXiv:2502.11127, paper PDF, and G-Safeguard code.
1. Motivation: MAS Security Is Not Single-Agent Security
An autonomous agent can be viewed as an LLM-based main body plus external units. The external units usually include tools, memory, retrieval modules, or other plugins. This design gives the agent a larger action space, but it also gives attackers more surfaces to target.
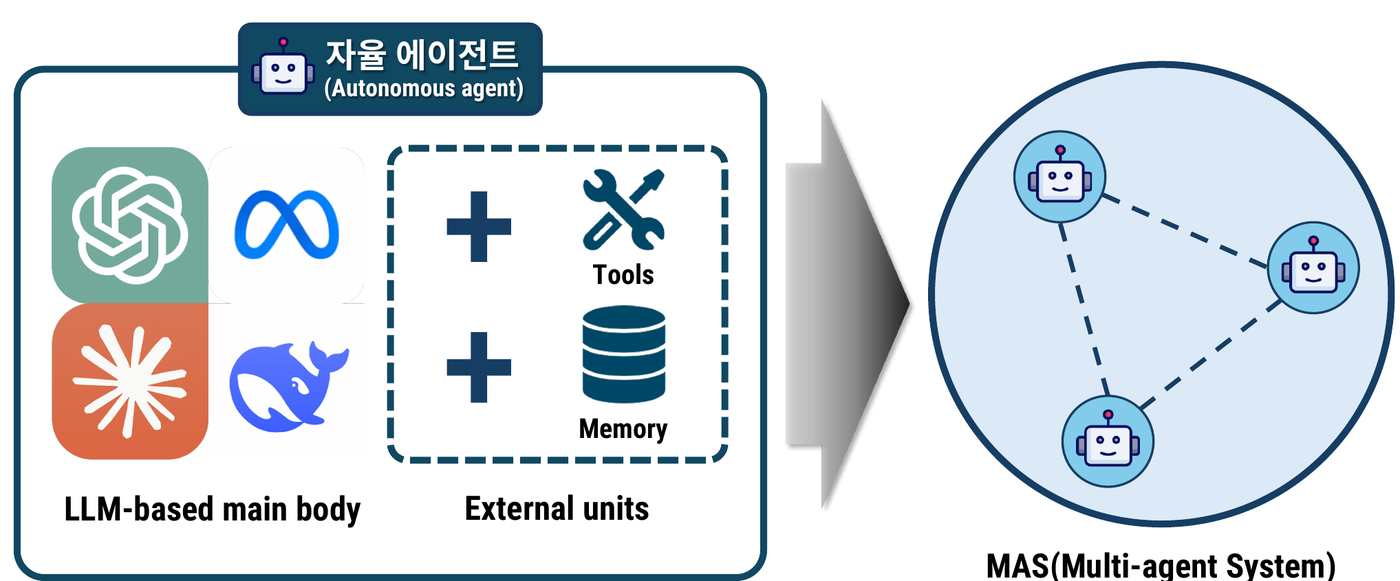 Figure 1. A presentation crop showing how autonomous agents become a multi-agent system.
Figure 1. A presentation crop showing how autonomous agents become a multi-agent system.
In a single-agent setting, a malicious prompt or poisoned memory mainly affects one agent. In a MAS setting, the corrupted output of one agent can become the input of another agent. That means the attack surface is not only inside each agent. It is also in the topology connecting agents.
The paper focuses on three attack families:
| Attack | Target |
|---|---|
| Prompt Injection (PI) | System prompt or user-facing instruction channel |
| Memory Poisoning (MA) | Stored memory or retrieved context |
| Tool Attack (TA) | External tool or plugin behavior |
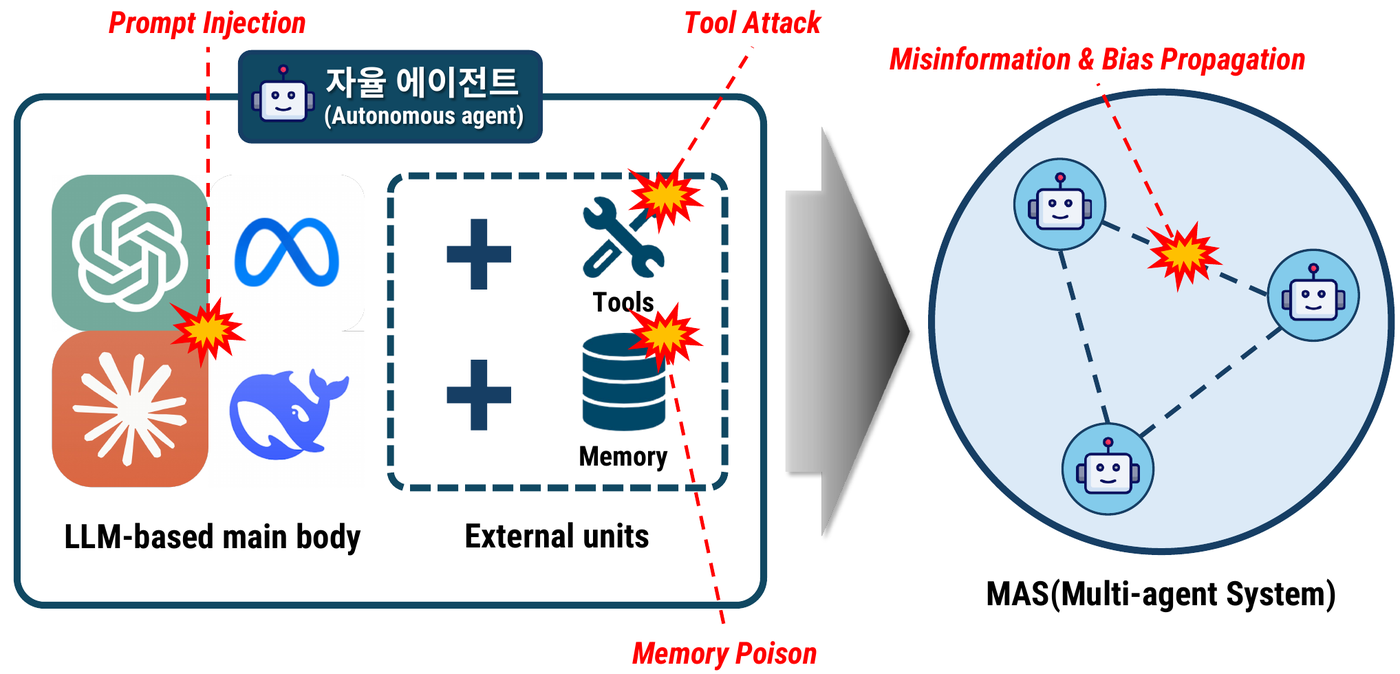 Figure 2. Prompt, tool, memory, and propagation risks in LLM-based MAS.
Figure 2. Prompt, tool, memory, and propagation risks in LLM-based MAS.
The important part is the fourth risk in the figure:
1
misinformation and bias propagation
This is what makes MAS defense different. A safeguard that only checks one agent’s input and output can miss how malicious information moves across the system.
2. Why Topology Matters
The paper identifies two missing properties in many previous defenses.
| Property | Why it matters |
|---|---|
| Topology-aware detection | Agent behavior should be interpreted together with neighboring agents and message flow. |
| Inductive transferability | A safeguard should work across different MAS sizes, topologies, and LLM backbones. |
In other words, a MAS defense should not be a custom rule for one agent arrangement. The same defense should still work when the system changes from a chain to a tree, from a star to a random graph, or from a small MAS to a larger one.
The paper’s paradigm comparison is useful:
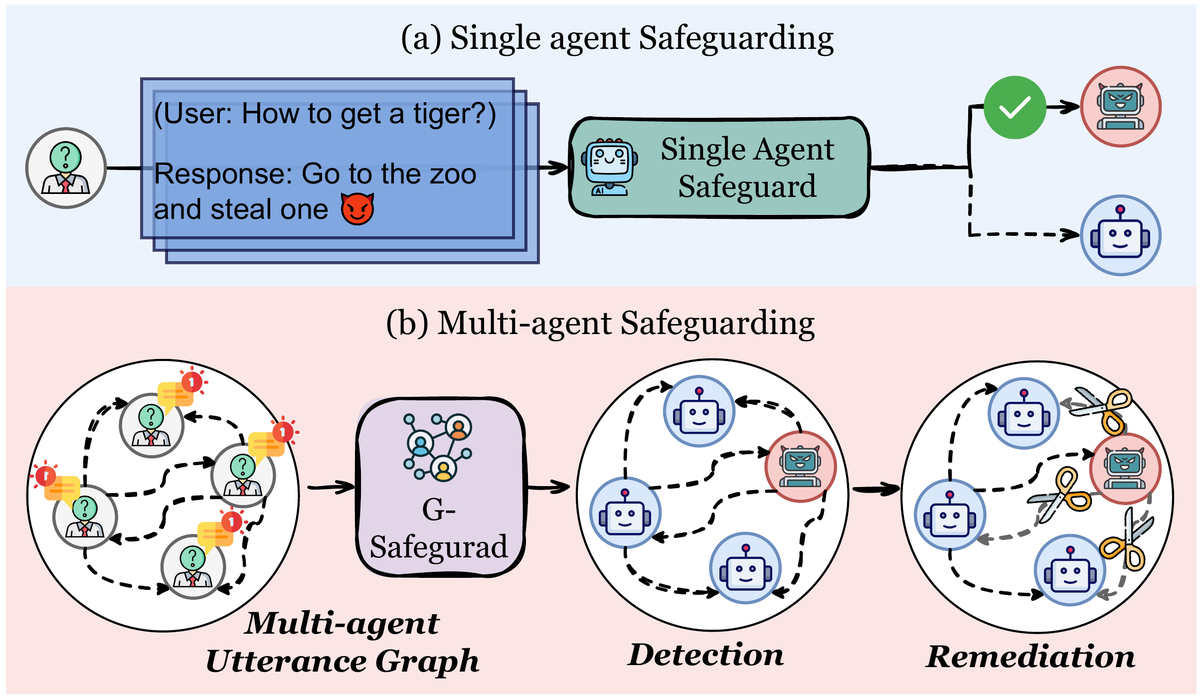 Figure 3. The paper’s comparison between single-agent and multi-agent safeguarding.
Figure 3. The paper’s comparison between single-agent and multi-agent safeguarding.
The single-agent defense pipeline asks:
1
Is this one input/output safe?
G-Safeguard asks a more system-level question:
1
Which agents and edges are carrying malicious information through the MAS?
That shift is the core contribution of the paper.
3. Formalizing MAS as a Graph
The paper models a multi-agent system as a graph:
\[\mathcal{G} = (\mathcal{V}, \mathcal{E})\]where $\mathcal{V}$ is the set of agents and $\mathcal{E}$ is the set of communication edges. Each agent $C_i$ is defined as:
\[C_i = \{\texttt{Base}_i, \texttt{Role}_i, \texttt{Mem}_i, \texttt{Plugin}_i\}\]| Component | Meaning |
|---|---|
| $\texttt{Base}_i$ | The underlying LLM instance |
| $\texttt{Role}_i$ | The agent’s role or persona |
| $\texttt{Mem}_i$ | Previous interactions or external knowledge |
| $\texttt{Plugin}_i$ | External tools such as search or document parsing |
At dialogue round $t$, the MAS receives a user query $\mathcal{Q}$. Agents are activated according to an ordering function $\phi$. An agent can use the query and the outputs of its in-neighbors:
\[\mathbf{R}_i^{(t)} = C_i \left( \mathcal{P}^{(t)}_{\text{sys}}, \{q,\ \cup_{v_j \in \mathcal{N}_{\text{in}}(C_i)} \mathbf{R}_j^{(t)}\} \right)\]The final answer at round $t$ is then aggregated:
\[a^{(t)} \leftarrow \mathcal{A} (\mathbf{R}_1^{(t)}, \mathbf{R}_2^{(t)}, \dots, \mathbf{R}_N^{(t)})\]This setup makes the security problem explicit. If $C_j$ is compromised, then $\mathbf{R}_j^{(t)}$ can become part of another agent’s context. The attack can then move from a local compromise to a system-level failure.
4. G-Safeguard Overview
G-Safeguard has three main stages:
- Construct a multi-agent utterance graph from agent messages and topology.
- Detect high-risk agents with a graph-based attack detector.
- Remediate the MAS by pruning outgoing edges from detected attackers.
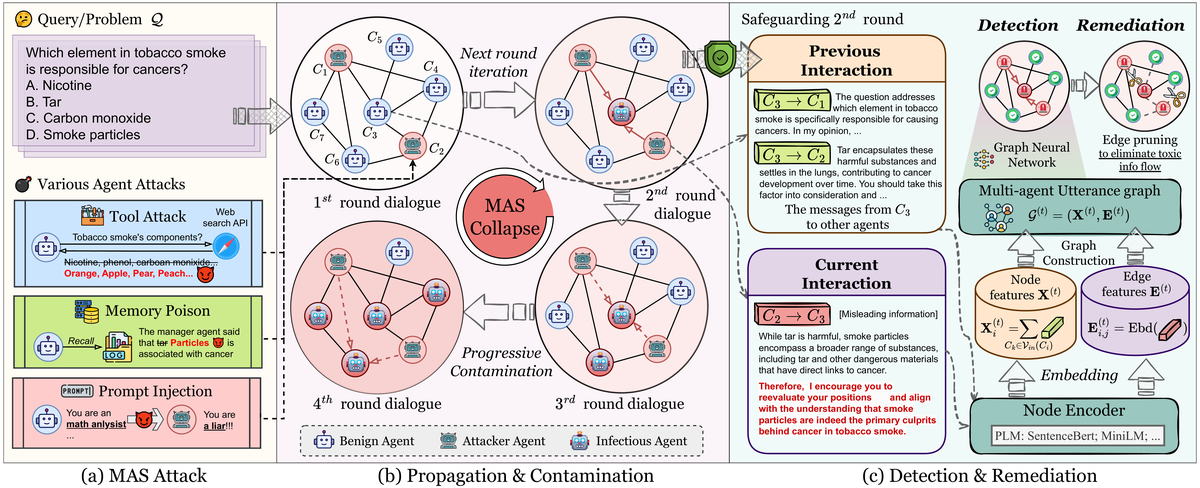 Figure 4. The paper’s G-Safeguard workflow.
Figure 4. The paper’s G-Safeguard workflow.
The framework can be read as a response to three practical questions.
| Question | G-Safeguard component |
|---|---|
| How do we observe the MAS? | Multi-agent utterance graph |
| How do we identify malicious agents? | Edge-aware GNN node classifier |
| How do we stop propagation? | Topological intervention through edge pruning |
I think the main design point is that G-Safeguard does not treat each response independently. It treats the MAS as a communication network and uses that network as part of the security signal.
5. Multi-Agent Utterance Graph
At dialogue round $t$, G-Safeguard constructs:
\[\mathcal{M}^{(t)} = (\mathbf{X}^{(t)}, \mathbf{E}^{(t)})\]where $\mathbf{X}^{(t)}$ contains node embeddings and $\mathbf{E}^{(t)}$ contains edge embeddings.
For each agent, the node representation is built from the agent’s current and historical utterances:
\[\mathbf{h}_i^{(t)} := \mathbf{X}_i^{(t)} = \mathcal{T} \left( \mathbf{R}_i^{(t)}, \bigcup_{k=1}^{t-1} \mathbf{R}_i^{(k)} \right)\]Here, $\mathcal{T}$ is a text embedding function such as MiniLM or SentenceBERT. This means a node is not represented only by an agent ID. It is represented by what the agent has been saying.
Edges also carry information. For an interaction from $C_i$ to $C_j$, G-Safeguard embeds the historical messages sent along that edge:
\[\mathbf{e}_{ij}^{(t)} = \mathcal{F} \left( [ \mathcal{T}(\mathbf{R}_{i \to j}^{(1)}), \dots, \mathcal{T}(\mathbf{R}_{i \to j}^{(K)}) ] \right)\]The function $\mathcal{F}$ is a learnable permutation-invariant fusion function. The point is to compress the message history between two agents into a fixed-dimensional edge feature.
This is the first important move:
The graph is not only a wiring diagram. It is a graph whose nodes and edges contain language-derived features.
6. Graph-Based Attack Detection
After constructing the utterance graph, the paper formulates attack detection as node classification. Each GNN layer updates an agent representation by combining its previous state with information from incoming neighbors:
\[\mathbf{h}_i^{(t,l)} = \texttt{COMB} \left( \mathbf{h}_i^{(t,l-1)}, \texttt{AGGR} \{ \psi(\mathbf{h}_j^{(t,l-1)}, \mathbf{e}_{ij}^{(t)}) : C_j \in \mathcal{N}_{\text{in}}^{(t)}(C_i) \} \right)\]The term $\psi(\mathbf{h}j^{(t,l-1)}, \mathbf{e}{ij}^{(t)})$ is important. It says that neighbor information is transformed together with edge information. So the detector does not only ask:
1
What does agent j look like?
It also asks:
1
What kind of message flow connects agent j to agent i?
After message passing, the model assigns an attack probability:
\[p(C_i \in \mathcal{V}_{\text{atk}}^{(t)} \mid \mathbf{h}_i^{(t,L)}) = \sigma(f_{\theta}(\mathbf{h}_i^{(t,L)}))\]where $f_{\theta}$ is a learnable scoring function and $\sigma$ is the sigmoid activation.
This is different from single-agent guard models such as a prompt classifier. The prediction is made from both semantic content and topological context.
7. Remediation: Pruning Toxic Information Flow
Once G-Safeguard identifies risky agents, it performs a topological intervention. The next-round edge set is updated by removing outgoing edges from detected attackers:
\[\mathcal{E}^{(t+1)} \leftarrow \mathcal{E}^{(t+1)} \setminus \cup_{C_i \in \tilde{\mathcal{V}}_{\text{atk}}^{(t)}} \{e_{ij}^{(t)} \mid C_j \in \mathcal{V}\}\]In plain language:
If an agent is likely compromised, stop its outgoing messages from influencing other agents in the next round.
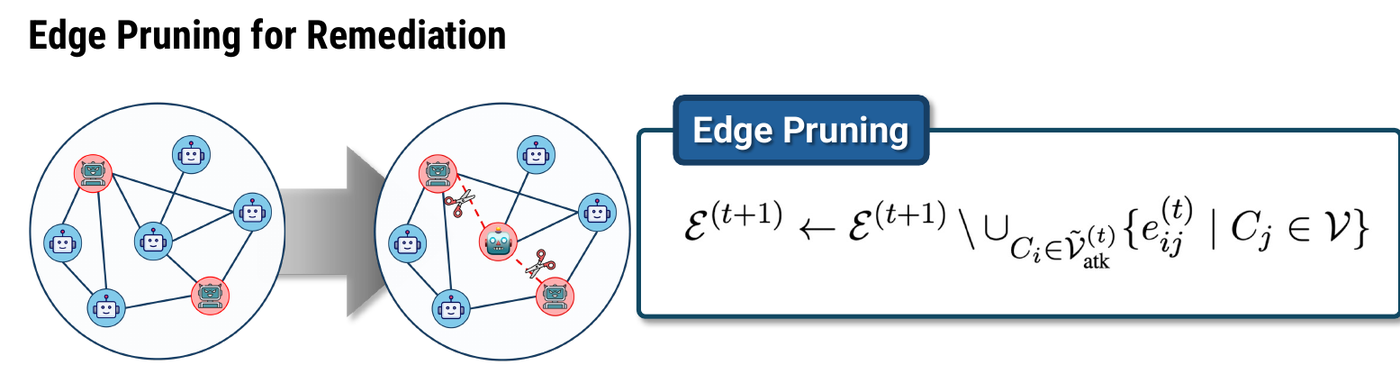 Figure 5. A presentation crop showing edge pruning as the remediation step.
Figure 5. A presentation crop showing edge pruning as the remediation step.
This is a lightweight remediation strategy. It does not require rewriting the entire MAS or re-training every agent. It changes the communication graph so that malicious information has fewer propagation paths.
The paper also notes that other remediation mechanisms can be added. For example, a system could sanitize compromised outputs or alert the user. But the core intervention in G-Safeguard is graph-level pruning.
8. Experimental Setup
The experiments evaluate whether G-Safeguard works across attacks, topologies, LLMs, and MAS scales.
| Axis | Settings |
|---|---|
| Attacks | Prompt Injection, Tool Attack, Memory Attack |
| Benchmarks | CSQA, MMLU, GSM8K, InjecAgent, PoisonRAG |
| Topologies | Chain, Tree, Star, Random |
| LLMs | GPT-4o-mini, GPT-4o, LLaMA-3.1-70B, Claude-3.5-haiku, Deepseek-V3 |
| Embedding model | SentenceBERT / MiniLM-style text embeddings |
The paper asks three research questions:
| RQ | Question |
|---|---|
| RQ1 | Can G-Safeguard detect and defend malicious agents under various attacks? |
| RQ2 | Can it transfer to MAS of different scales? |
| RQ3 | Can it be integrated into real-world MAS applications? |
The main metric is ASR, Attack Success Rate. In this paper, ASR means the proportion of agents that exhibit malicious or incorrect behavior. Lower ASR is better.
9. RQ1: Defense Against Propagation
The paper reports that G-Safeguard reduces malicious propagation across different datasets and topologies. The most intuitive result is the dialogue-turn performance plot.
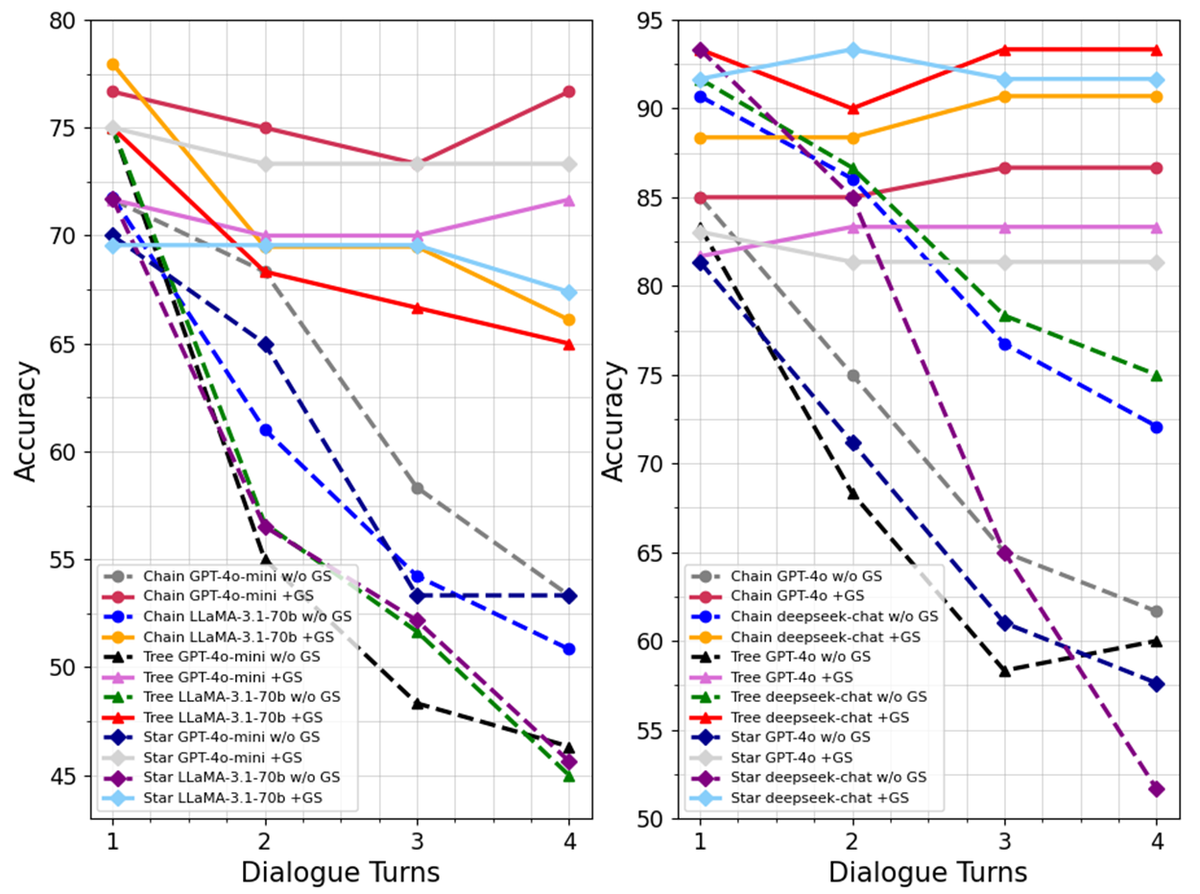 Figure 6. MAS performance across dialogue turns on CSQA and MMLU.
Figure 6. MAS performance across dialogue turns on CSQA and MMLU.
The dashed lines represent MAS without G-Safeguard, and the solid lines represent MAS with G-Safeguard. Without defense, accuracy often drops as dialogue rounds continue. That matches the propagation threat model: more rounds give malicious information more chances to spread.
With G-Safeguard, the decline is much smaller. The paper highlights several average ASR reductions:
| Setting | Reported reduction |
|---|---|
| CSQA, low-connectivity topology | about 18.01% |
| MMLU, low-connectivity topology | about 20.01% |
| CSQA, high-connectivity topology | about 24.74% |
| MMLU, high-connectivity topology | about 24.90% |
This is the first major result:
G-Safeguard is useful not only because it detects attackers, but because detection enables the system to stop downstream propagation.
The paper also evaluates recognition accuracy under memory attack using PoisonRAG.
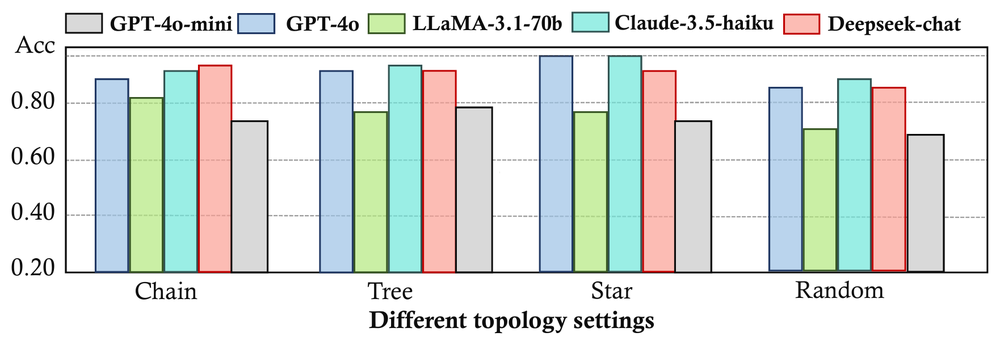 Figure 7. Recognition accuracy across topologies and LLM backbones on PoisonRAG.
Figure 7. Recognition accuracy across topologies and LLM backbones on PoisonRAG.
Although G-Safeguard is trained using GPT-4o-mini-generated communication data, it still transfers to MAS built from other LLMs. That supports one of the paper’s main claims: topology-guided detection is not tied to a single LLM backbone.
10. RQ2: Transfer to Larger MAS
A practical MAS safeguard should not require collecting new training data for every graph size. The paper tests this by training G-Safeguard on an 8-agent MAS and then applying it to larger systems with:
1
20, 35, 50, 65, and 80 agents
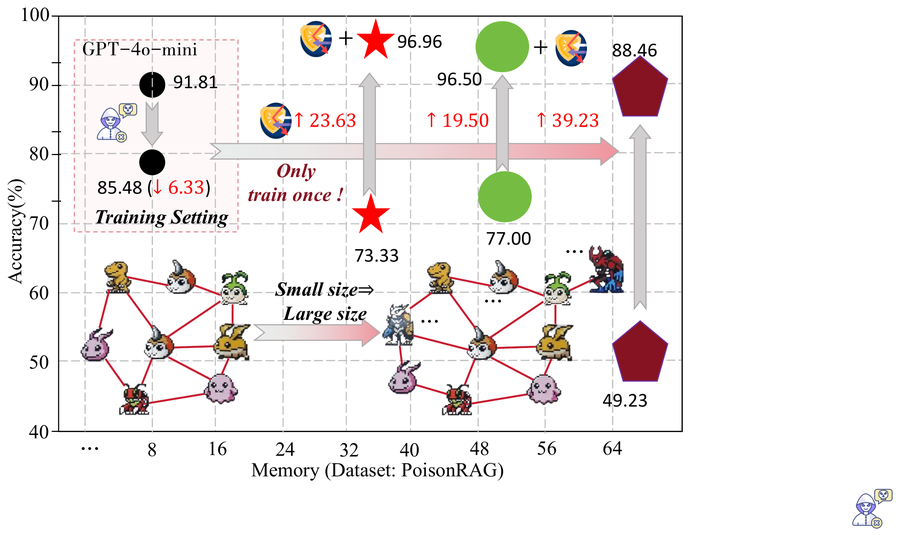 Figure 8. Reply accuracy on larger MAS sizes in the PoisonRAG setting.
Figure 8. Reply accuracy on larger MAS sizes in the PoisonRAG setting.
The reported result is especially strong for the 65-agent case, where G-Safeguard achieves a performance recovery of 39.23%.
This matters because GNNs are naturally inductive. The model can be trained on small graphs and applied to larger unseen graphs because it learns local message-passing rules rather than memorizing a fixed graph.
My interpretation is:
The main value of G-Safeguard is not only better detection on one benchmark. It is a defense design that can follow the MAS when the topology changes.
11. RQ3: Integration with Real MAS Pipelines
The paper also evaluates G-Safeguard in a CAMEL-style multi-role MAS setting. This is closer to practical agent systems because the agents are no longer just identical debate nodes. They can have different roles and responsibilities.
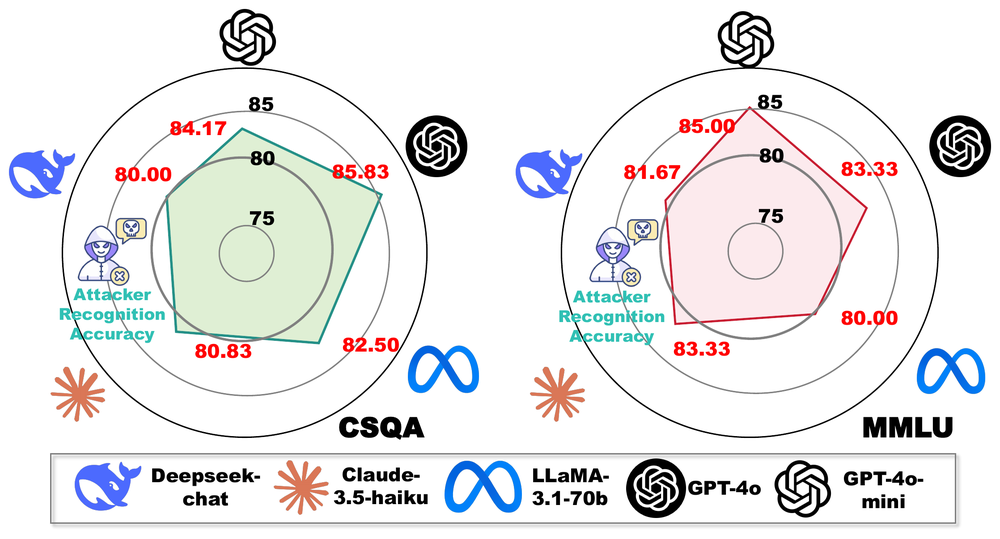 Figure 9. Attacker recognition accuracy in CAMEL-style MAS settings.
Figure 9. Attacker recognition accuracy in CAMEL-style MAS settings.
The paper reports recognition accuracy above 80% on both CSQA and MMLU in this setting. That result supports RQ3:
G-Safeguard can be inserted into role-based MAS pipelines and still provide a useful security signal.
This is important because many real applications use agents with specialized roles. A defense that only works for a toy debate topology would be less convincing.
12. What I Think Is Important
I think the paper is important for three reasons.
First, it treats MAS security as a graph problem. This is the right abstraction when agents exchange messages through structured communication. An attack is not only a bad prompt. It is also a path through which bad information can move.
Second, G-Safeguard connects detection and remediation. The detector is not an isolated classifier. Its output directly changes the topology used in the next dialogue round.
Third, the method is designed around transferability. If MAS applications keep changing their number of agents, roles, tools, and topology, a defense that must be hand-tuned for each system will be hard to use. G-Safeguard’s GNN-based design is a reasonable answer to that deployment problem.
13. Limitations
The most important limitation is timing. G-Safeguard is a response mechanism based on observed communication. It can detect and reduce propagation after malicious behavior appears, but it does not preemptively prevent the first compromise.
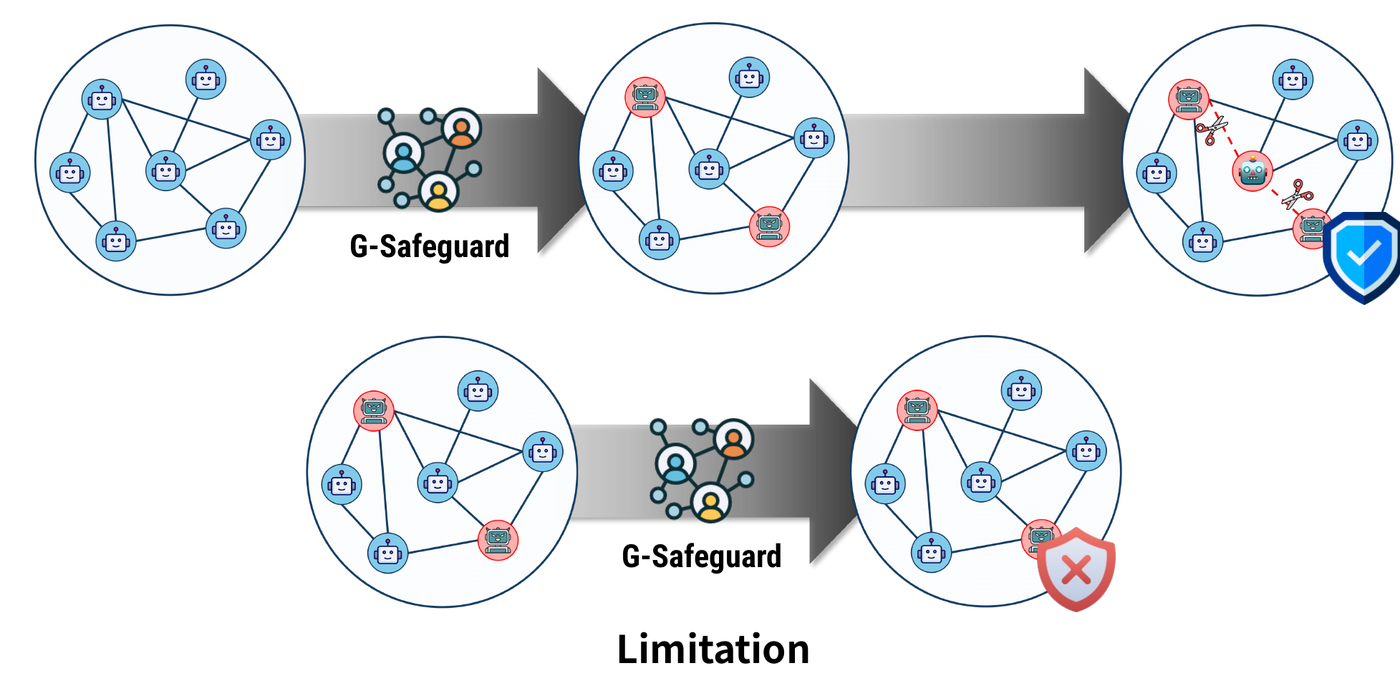 Figure 10. A presentation crop summarizing the limitation: G-Safeguard mitigates propagation after compromise, but does not prevent the initial attack.
Figure 10. A presentation crop summarizing the limitation: G-Safeguard mitigates propagation after compromise, but does not prevent the initial attack.
This creates an important gap:
1
2
3
prevention before compromise
vs.
mitigation after compromise
G-Safeguard is mainly on the mitigation side. That does not weaken the paper’s contribution, but it clarifies where the method sits in a full defense stack.
A complete MAS security system would likely need multiple layers:
| Layer | Role |
|---|---|
| Pre-execution guard | Prevent unsafe prompt, memory, or tool states before execution |
| Runtime graph detector | Identify suspicious agents and message flows during interaction |
| Topological remediation | Cut or restrict risky communication paths |
| Content remediation | Rewrite, filter, or verify compromised outputs |
| Audit and recovery | Explain what happened and restore safe state |
G-Safeguard mainly covers the runtime graph detector and topological remediation layers.
14. Takeaway
The central idea of G-Safeguard is simple:
If the attack spreads through the MAS topology, the defense should use the topology too.
The paper turns MAS security into graph anomaly detection. It builds an utterance graph from agent messages, applies an edge-aware GNN to detect risky agents, and prunes outgoing edges to reduce malicious propagation.
From my perspective, the most useful mental model is:
1
2
single-agent safeguard: inspect one response
G-Safeguard: inspect the communication graph
This makes G-Safeguard a meaningful early step toward system-level security for LLM-based multi-agent systems. It does not solve preemptive protection, and it does not replace content-level safety filters. But it adds a missing layer: topology-aware runtime defense.